Normal Mapping
- 2.23.1. Overview
- 2.23.2. Tangent Space
- 2.23.3. Tangent/Bitangent Generation
- 2.23.4. Normal Maps
- 2.23.5. Rendering With Normal Maps
Overview
The r2 package supports the use of tangent-space normal mapping to allow for per-pixel control over the surface normal of rendered triangles. This allows for meshes to appear to have very complex surface details without requiring those details to actually be rendered as triangles within the scene.
Tangent Space
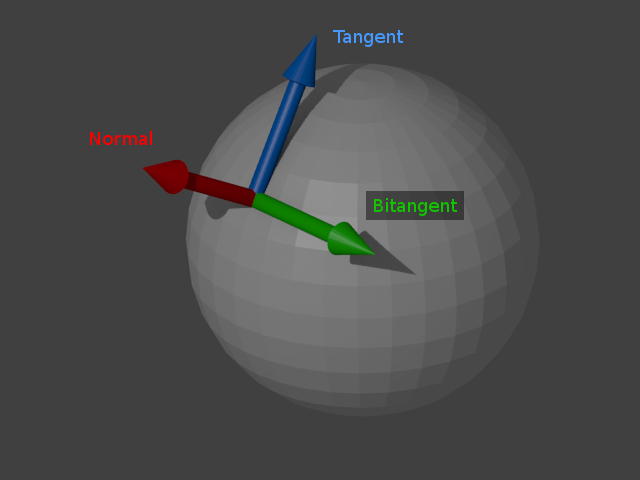
Conceptually, there is a three-dimensional coordinate system based at each vertex, formed by three orthonormal basis vectors: The vertex normal, tangent and bitangent vectors. The normal vector is a the vector perpendicular to the surface at that vertex. The tangent and bitangent vectors are parallel to the surface, and each vector is obviously perpendicular to the other two vectors. This coordinate space is often referred to as tangent space. The normal vector actually forms the Z axis of the coordinate space, and this fact is central to the process of normal mapping. The coordinate system at each vertex may be left or right-handed depending on the arrangement of UV coordinates at that vertex.
Tangent/Bitangent Generation
Tangent and bitangent vectors can be generated by the modelling programs that artists use to create polygon meshes, but, additionally, the R2MeshTangents class can take an arbitrary mesh with only normal vectors and UV coordinates and produce tangent and bitangent vectors. The full description of the algorithm used is given in Mathematics for 3D Game Programming and Computer Graphics, Third Edition [24], and also in an article by the same author. The actual aim of tangent/bitangent generation is to produce a pair of orthogonal vectors that are oriented to the x and y axes of an arbitrary texture. In order to do achieve this, the generated vectors are oriented according to the UV coordinates in the mesh.
In the r2 package, the bitangent vector is not actually stored in the mesh data, and the tangent vector for any given vertex is instead stored as a four-component vector. The reasons for this are as follows: Because the normal, tangent, and bitangent vectors are known to be orthonormal, it should be possible to reconstruct any one of the three vectors given the other two at run-time. This would eliminate the need to store one of the vectors and would reduce the size of mesh data (including the on-disk size, and the size of mesh data allocated on the GPU) by a significant amount. Given any two orthogonal vectors V0 and V1, a vector orthogonal to both can be calculated by taking the cross product of both, denoted (cross V0 V1). The problem here is that if V0 is assumed to be the original normal vector N, and V1 is assumed to be the original tangent vector T, there is no guarantee that (cross N T) will produce a vector equal to the original bitangent vector B: There are two possible choices of value for B that differ only in the sign of their coordinate values.
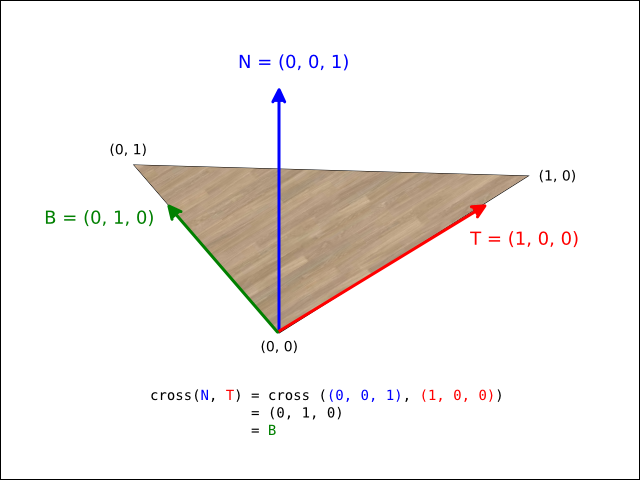
As an example, a triangle that will produce T and B vectors that form a right-handed coordinate system with the normal vector N (with UV coordinates indicated at each vertex):
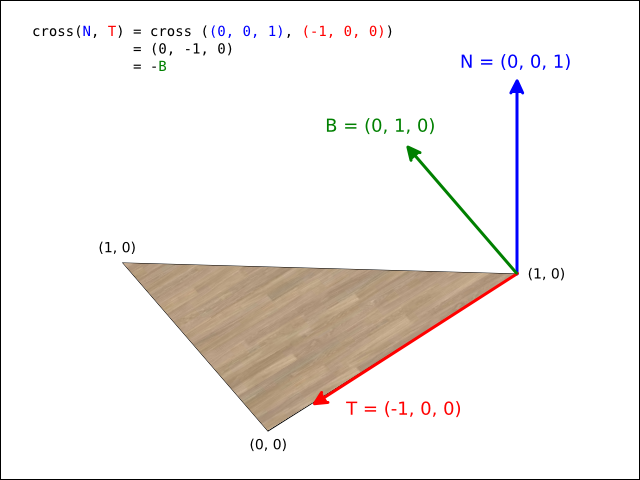
The same triangle will produce vectors that form a left-handed system when generating vectors for another vertex (note that the result of (Vector3f.cross N T) = (Vector3f.negation B) ):
However, if the original tangent vector T was augmented with a piece of extra information that indicated whether or not the result of (cross N T) needed to be inverted, then reconstructing B would be trivial. Therefore, the fourth component of the tangent vector T contains 1.0 if (cross N T) = B, and -1.0 if (cross N T) = -B. The bitangent vector can therefore be reconstructed by calculating cross (N, T.xyz) * T.w.
With the three vectors (T, B, N), it's now possible construct a 3x3 matrix that can transform arbitrary vectors in tangent space to object space:
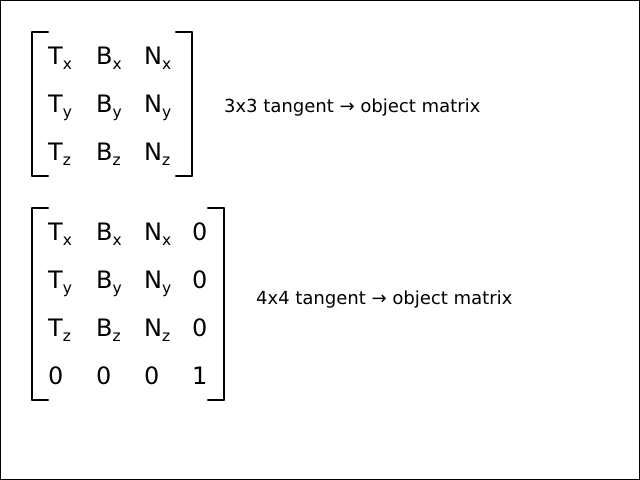
With this matrix, it's now obviously possible to take an arbitrary vector in tangent space and transform it to object space. Then, with the current normal matrix (object → eye), transform the object space vector all the way to eye space in the same manner as ordinary per-vertex object space normal vectors.
Normal Maps
A normal map is an ordinary RGB texture where each texel represents a tangent space normal vector. The x coordinate is stored in the red channel, the y coordinate is stored in the green channel, and the z coordinate is stored in the blue channel. The original coordinate values are assumed to fall within the inclusive range [-1.0, 1.0], and these values are mapped to the range [0.0, 1.0] before being encoded to a specific pixel format.
As an example, the vector (0.0, 0.0, 1.0) is first mapped to (0.5, 0.5, 1.0) and then, assuming an image format with 8-bits of precision per color channel, encoded to (0x7f, 0x7f, 0xff). This results in a pale blue color that is characteristic of tangent space normal maps:

Typically, tangent space normal maps are generated from a simple height maps: Greyscale images where 0.0 denotes the lowest possible height, and 1.0 indicates the highest possible height. There are multiple algorithms that are capable of generating normal vectors from height maps, but the majority of them work from the same basic principle: For a given pixel with value h at location (x, y) in an image, the neighbouring pixel values at (x - 1, y), (x - 1, y - 1), (x + 1, y), (x + 1, y + 1) are compared with h in order to determine the slope between the height values. As an example, the Prewitt (3x3) operator when used from the gimp-normalmap plugin will produce the following map from a given greyscale height map:
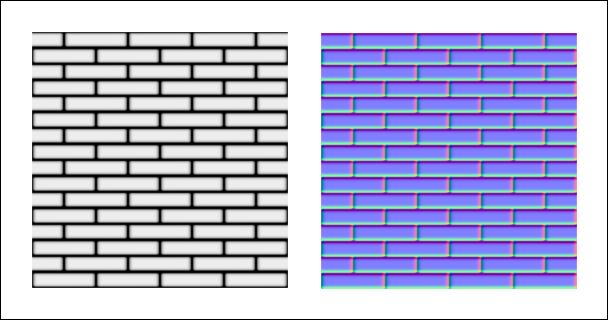
It is reasonably easy to infer the general directions of vectors from a visual inspection of a tangent space normal map alone. In the above image, the flat faces of the bricks are mostly pale blue. This is because the tangent space normal for that surface is pointing straight towards the viewer - mostly towards the positive z direction. The right edges of the bricks in the image are tinted with a pinkish hue - this indicates that the normal vectors at that pixel point mostly towards the positive x direction.
Rendering With Normal Maps
As stated, the purpose of a normal map is to give per-pixel control over the surface normal for a given triangle during rendering. The process is as follows:
- Calculate the bitangent vector B from the N and T vectors. This step is performed on a per-vertex basis (in the vertex shader ).
- Construct a 3x3 tangent → object matrix M from the (T, B, N) vectors. This step is performed on a per-fragment basis (in the fragment shader) using the interpolated vectors calculated in the previous step.
- Sample a tangent space normal vector P from the current normal map.
- Transform the vector P with the matrix M by calculating M * P, resulting in an object space normal vector Q.
- Transform the vector Q to eye space, in the same manner that an ordinary per-vertex normal vector would be (using the 3x3 normal matrix ).
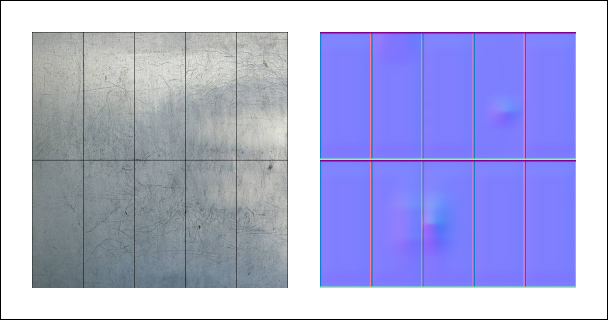
Effectively, a "replacement" normal vector is sampled from the map, and transformed to object space using the existing (T, B, N) vectors. When the replacement normal vector is used when applying lighting, the effect is dramatic. Given a simple two-polygon square textured with the following albedo texture and normal map:
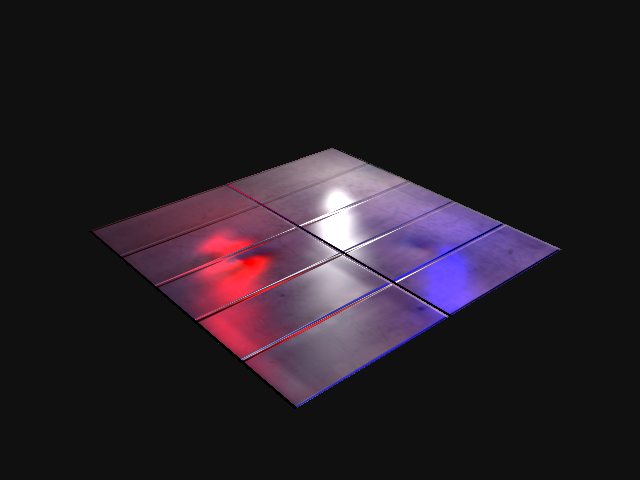
The square when textured and normal mapped, with three spherical lights:
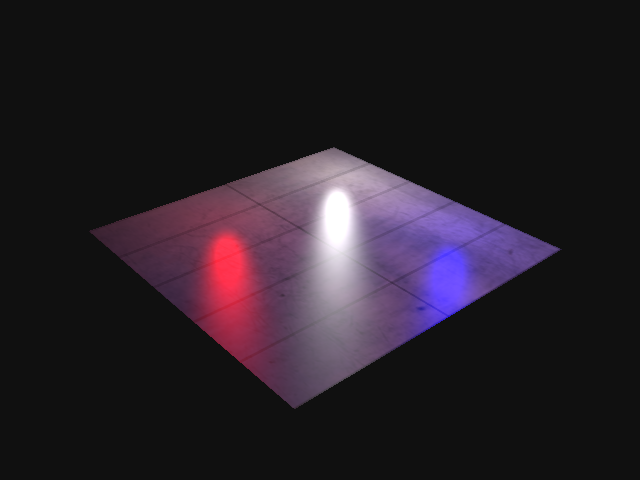
The same square with the same lights but missing the normal map:
[24]
See section 7.8.3, "Calculating tangent vectors".